
Kit de bras mécanique robotique coloré DIY avec contrôleur infrarouge et servomoteur en métal
49,01€
Une partie de la critique a été traduite automatiquement.

Arivved in a short number of days and in a very good package. Not assembled yet but all the parts look in good conditions.
J'ai trouvé ce qui suit concernant le logiciel Arduino : - Le logiciel semble bien fonctionner MAIS le logiciel n'est PAS le même que n'importe lequel des .ino fichiers contenus dans le téléchargement référencé dans les instructions - Manipulator Suite V2.0 Resource Pack. - Par conséquent, si vous voulez expérimenter avec le firmware dans le Resource Pack, il peut être une bonne idée d'acheter un deuxième ARDUINO UNO et de l'utiliser pour les expériences. - Bien que le kit comprenne une télécommande infrarouge, le micrologiciel installé dans le kit ne semble pas posséder le programme infrarouge. - Les codes infrarouges de la télécommande ne correspondent pas aux codes infrarouges utilisés dans le logiciel infrarouge du Resource Pack. - Le Resource Pack comporte deux programmes principaux, mearmJoystick.ino et armbotJoystickB.ino - mearmJoystick.ino produit un comportement similaire à celui du logiciel pré-installé, mais est inférieur. NON recommandé sauf si vous faites une réécriture substantielle. Avec le logiciel pré-installé et mearmjoystick.ino, les joysticks contrôlent directement les servos comme décrit dans les instructions. - Le logiciel armbotJoystickB fonctionne d'une manière très différente. Les joysticks sont utilisés pour régler la position de la pince en termes de coordonnées x, y et z. Le joystick gauche horizontal est utilisé pour augmenter/diminuer la coordonnée x. La verticale gauche est utilisée pour définir la coordonnée z et la verticale droite pour définir la coordonnée y. L'horizontale droite est utilisée pour ouvrir/fermer la pince. Si vous modifiez une coordonnée, au moins 2 et parfois 3 servomoteurs opèrent pour repositionner la pince au nouveau point dans l'espace 3D. Assis derrière le bras du robot, l'axe des x est latéral, l'axe des z pointe en avant et l'axe des y est vertical. Beaucoup à explorer avec ce logiciel - très éducatif.


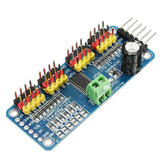
PCA9685 Module I2C contrôleur de moteur de servo PWM 16 canaux 12 bits









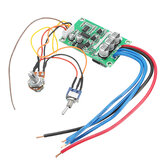

Module d'alimentation convertisseur élévateur réglable DC-DC 4A XL6009E1

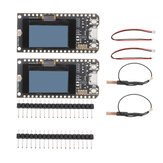
Kit de générateur de signaux Geekcreit® XR2206 DIY Sortie sinusoïdale triangulaire carrée 1HZ-1MHZ


![[UE / US Direct] Machine de gravure laser SCULPFUN S9 Technologie de mise en forme de faisceau laser de haute précision Machine de découpe laser pour gravure sur bois et acrylique Structure métallique complète Conception de montage rapide Zone de gravure de 410x420mm](https://imgaz.staticbg.com/thumb/grid/oaupload/banggood/images/96/18/7d36d6dd-8e39-43ae-b4bc-31cd49ff1c27.jpg)








Batterie LiPo ZOP Power 22,2V 5500mAh 75C 6S avec connecteur XT60 pour drone RC

Récepteur FlySky 2.4G 6CH FS-iA6B avec sortie PPM et port iBus

RGT EX86010 CJ 1/10 2.4G 4WD Grimpant Camion Crawler étanche Voiture RC Modèles de véhicules

















